
iFlight SucceX-D Mini TwinG Stack (F7 40A 2-6S) for DJI HD FPV system

 Add to
Wishlist
Add to
WishlistiFlight SucceX-D TwinG Stack (F7 40A 2-6S) Direct fitment for DJI HD FPV system with 50A burst.
The TwinG (Twin Gyro) flight controller combines data from the two onboard gyros to provide unmatched performance. In addition this version is made specifically for the DJI HD system and plugs into the HD Air unit. This is the ultimate flight controller and 4in1 ESC to use on your DJI HD quad.
Note: The TwinG uses a USB Type-C connector.
Features
-
Universal USB Type C connector instead of micro USB
- 2-6S compatible flight stack
- Supports BLHeli pass-through for easy ESC upgrade and configuration.
- Designed to support DJI Digital FPV.
- 40A BLheli32 ESC to power just about any motors you can throw at it
FC Specifications
- MCU: 216MHz STM32F722
- Gyro:2x ICM20689
- Blackbox:32MB
- Betaflight OSD: YES
- BEC: 5V 2.5A / 9V 2.5A
- Current sensor scale: 100
- Inverter for SBUS input (UART2-RX)
- Smartaudio & Tramp VTX protocol supported
- DJI Air unit plug&play (6-pin)
- Beeper pad : Yes
- RSSI input pad: No
- UARTs:5
- BLHeli32 Telemetry:RX6
- Input voltage:recommended 2-6S, MAX 8S
- Target: STM32F7X2
- CLI config – IFLIGHTF4_TWIN_G.config
- Mounting pattern: 20*20mm φ3
- Dimensions: 27*27mm
- USB type-C
ESC Specification
- MCU: STM32F051K66
- Up tp 48kHz PWM frequency
- Capacity: 470uF/50V
- Current Sensor: Yes
- Input: recommended 2-6S
- Constant: 40A / Burst: 50A
- BlHeli32 telemetry: Yes
- Supports up to Dshot1200, Proshot, Oneshot, Multishot
- Target: iFlight-BL32-4IN1
- Weight: 16.7g
- Mounting pattern: 20*20mm φ3
- Dimensions: 31*31mm (including the power pads)
TwinG Gyro Setup
-The Betaflight target’s default setting is ‘gyro_to_use = both’ / Gyro fusion is active!
-To check the current setting, please use CLI and type ‘get gyro’ to find the responding entry.
-Change the settings with ‘set gyro_to_use = ’ and type ‘save’.
-To get the most reliable performance or encounter noise, oscillation and bent props: Please use the default setting ‘both”.
-For Single Gyro use, please use the debugging options to find and tune for the cleaner gyro, but lose the dynamic fusion and averaging.
-BF offers the following dual gyro debug options: dual_gyro_raw, dual_gyro, dual_gyro_diff, dual_gyro_combined.
-BlackboxLog explorer graph: dual_gyro_raw Debugging = [0] Roll Gyro1, [1] Pitch Gyro1, [2] Roll Gyro2, [3] Pitch Gyro2.
-The displayed graph will show the Gyro_Raw reading (no filters applied), both gyros can be compared.
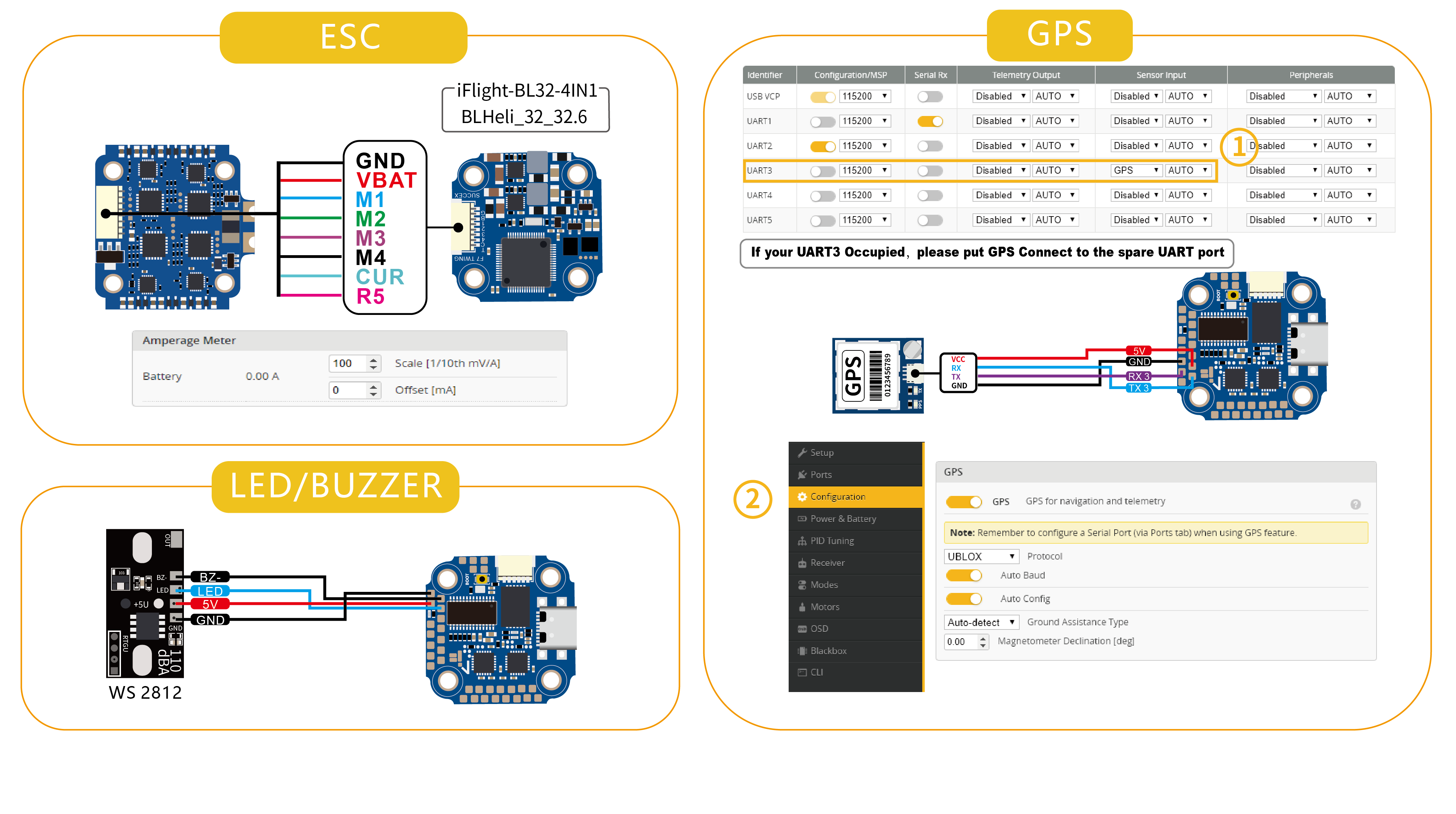
Wiring Guide
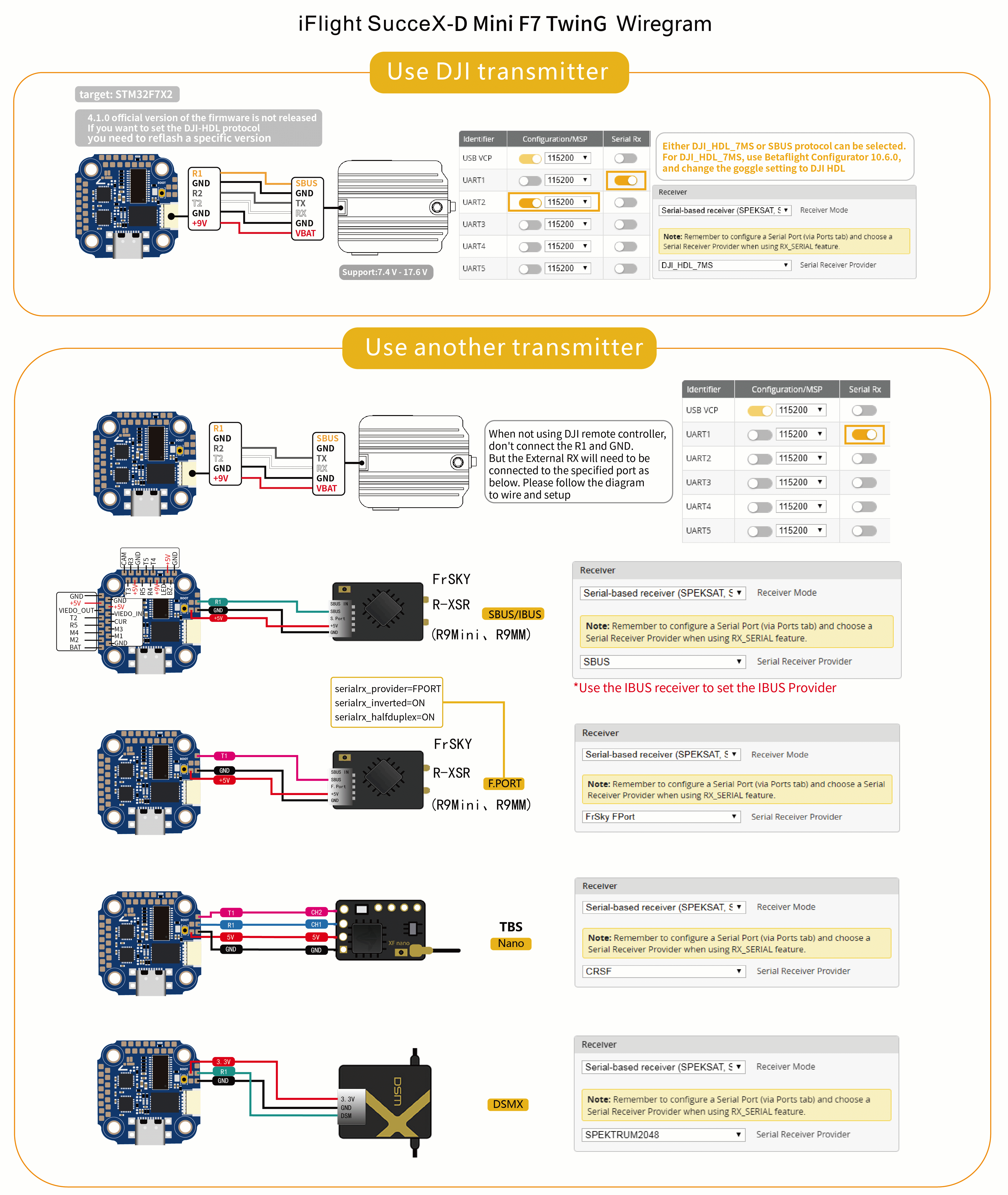
*DJI HD system shown in photos is not included